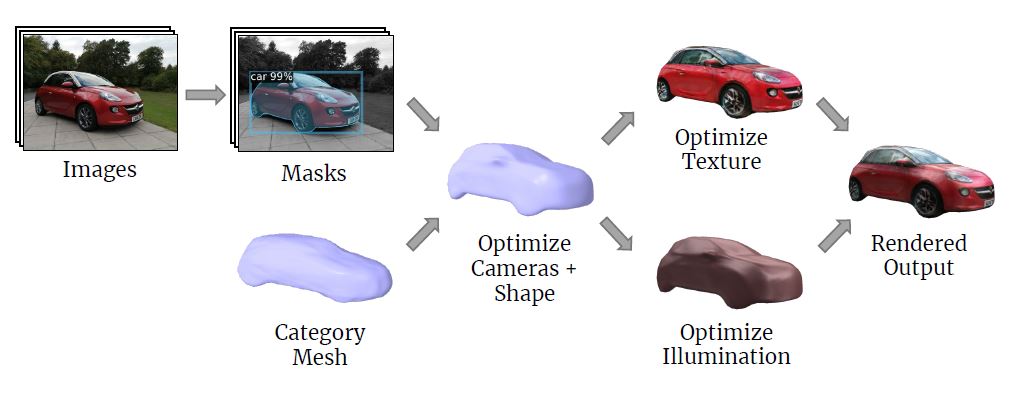
Reconstructed cars from the Multiview Marketplace Cars dataset. Given
several (8-16) unposed images of the same instance, NeRS outputs a
textured 3D reconstruction along with the illumination parameters.
We demonstrate the generality of NeRS on assorted objects.
Abstract
Recent history has seen a tremendous growth of work exploring implicit representations of geometry and
radiance, popularized through Neural Radiance Fields (NeRF). Such works are fundamentally based on a
(implicit) volumetric representation of occupancy, allowing them to model diverse scene
structure including translucent objects and atmospheric obscurants. But because the vast majority of
real-world scenes are composed of well-defined surfaces, we introduce a surface analog of
such implicit models called Neural Reflectance Surfaces (NeRS). NeRS learns a neural shape representation of
a closed surface that is diffeomorphic to a sphere, guaranteeing water-tight reconstructions. Even more
importantly, surface parameterizations allow NeRS to learn (neural) bidirectional surface reflectance
functions (BRDFs) that factorize view-dependent appearance into environmental illumination, diffuse color
(albedo), and specular "shininess." Finally, rather than illustrating our results on synthetic scenes or
controlled in-the-lab capture, we assemble a novel dataset of multiview images from online marketplaces for
selling goods. Such "in-the-wild" multiview image sets pose a number of challenges, including a small number
of views with unknown/rough camera estimates. We demonstrate that surface-based neural reconstructions
enable learning from such data, outperforming volumetric neural rendering-based reconstructions. We hope
that NeRS serves as a first step toward building scalable, high-quality libraries of real-world shape,
materials, and illumination.
Jason Y. Zhang, Gengshan Yang, Shubham Tulsiani*, and Deva Ramanan*
@inproceedings{zhang2021ners,
title={{NeRS}: Neural Reflectance Surfaces for Sparse-view 3D Reconstruction in the Wild},
author={Zhang, Jason Y. and Yang, Gengshan and Tulsiani, Shubham and Ramanan, Deva},
booktitle={Conference on Neural Information Processing Systems},
year={2021}
}
Check out Michael Hasey'sthesis
analyzing
the architecture of Ukrainian
churches by reconstructing over 300 NeRS models from online images!
Acknowledgements
This work was supported in part by the NSF GFRP (Grant No. DGE1745016),
Singapore DSTA, and CMU Argo AI Center for Autonomous Vehicle Research.
Webpage
template.